该用户从未签到
39
41
208
管理员
182546r55bpz3yizf3iccg.jpg (38.89 KB, 下载次数: 543)
下载附件
2017-1-17 22:57 上传
使用道具 举报
本版积分规则 发表回复 回帖后跳转到最后一页
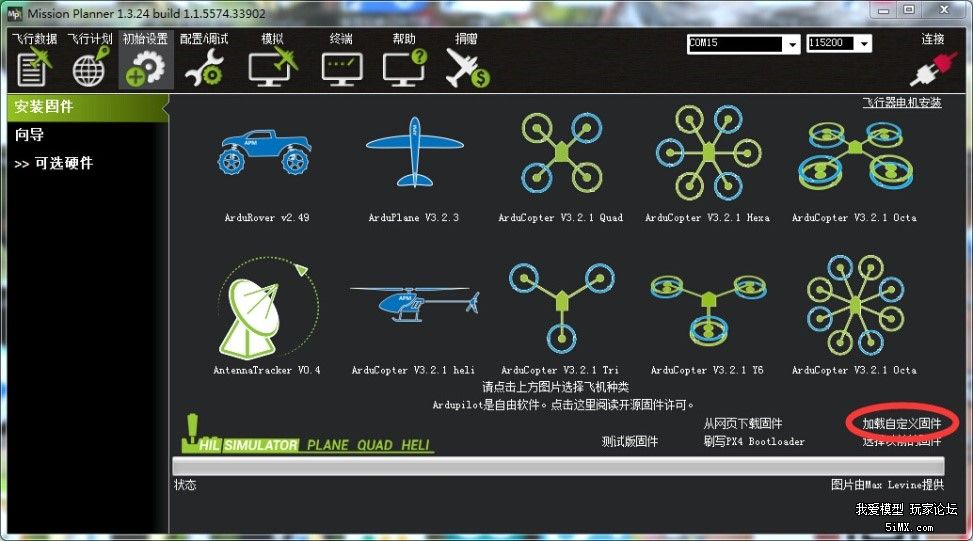
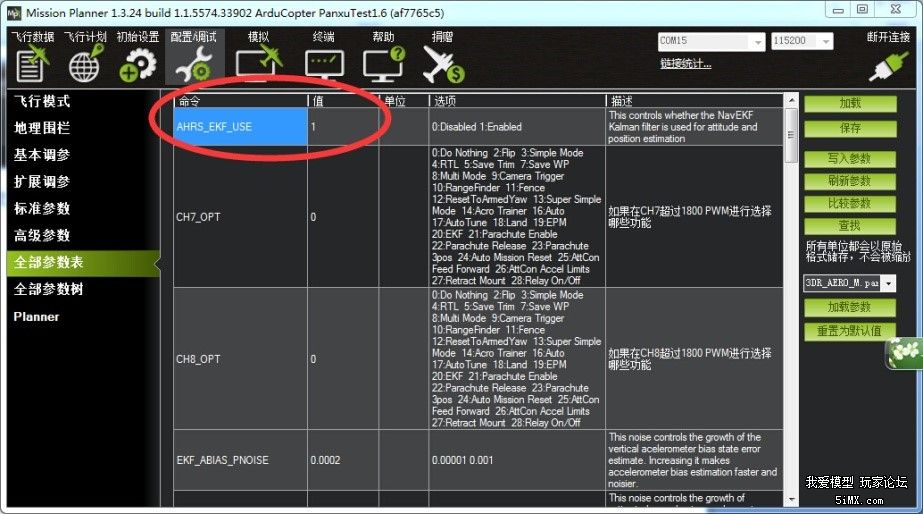
光流传感器使用说明
无人机飞行编队表演
17796406025
服务时间 9:00-20:00
用微信扫一扫互动赢积分







 发表于 2017-1-17 15:05:14
发表于 2017-1-17 15:05:14





 微信
微信 收藏
收藏





